
最优化2:线性规划及单纯形法
本文旨在介绍线性规划的基本概念、单纯形算法和分析单纯形法背后的原理,参考资料包括Convex Optimization(by Stephen Boyd),《最优化理论与算法(第2版)》(陈宝林 编著),维基百科以及其他在线资料等(详情见参考)。
线性规划(LP, Linear Programming)是指具有线性约束(包括等式约束和非等式约束)、线性目标函数的最优化问题。它是数学规划中极为特殊的一种形式。
其数学表达为
特点:
- 可行域是一个凸集(包括空集)。因为其可行域有限多个半空间和超平面的交集,因此是一个多面体(前文已经说明多面体是一个凸集)。
- 目标函数既是凸函数,又是凹函数(因为是线性函数或仿射函数)
定理:
解的存在性定理[1]。因为凸函数的最大值必在边界处取得,凹函数的最小值必在边界处取得。因此线性规划的目标函数的最小值和最大值都在边界处取得。因此线性规划的最优解(如果有的话)一定能在极点(vertices)处取得(当有多个最优解时,最优解的集合一定包含某个极点)。在两种情况下,LP无最优解:
- LP不可行。即LP的约束自相矛盾,也即LP的可行域为空集。因为无可行解,自然也就没有最优解。
- LP的可行域在目标函数梯度负方向无界(如果是最大化目标函数,则LP可行域在目标函数梯度方向无界)。在这种情况下,我们总能沿着负梯度方向找到更优的解,使得目标函数更小,因此无最优解。
多面体的极点和极方向。
定义(极点):
设 为非空凸集,
,若
不能表示为
中两个不同点的严格凸组合,即
,则称
为凸集
中的极点。
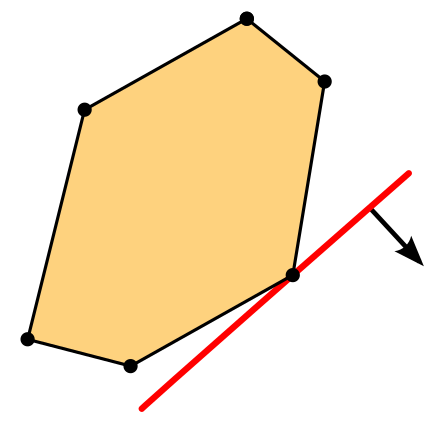
从几何上看,极点是凸集的边界的一点,包含该点且不以该点为端点的任意线段都不在这个凸集中。多面体的极点就是构成该多面体的超平面的交点。而圆上的每一点都是极点。
可以看出,有界集中任意一点都可以表示为极点的凸组合。但是对无界集却不成立,这时需要引入极方向的概念。
定义(极方向):
设 为闭凸集,
为非零向量,如果对
中的每一个
,都有射线
则称 为
的方向。若
不能表示为
的两个不同方向的整的线性组合,则称
为
的极方向。
几何上,只有无界集才有方向。而极方向则是无界集的某个边界的方向向量。
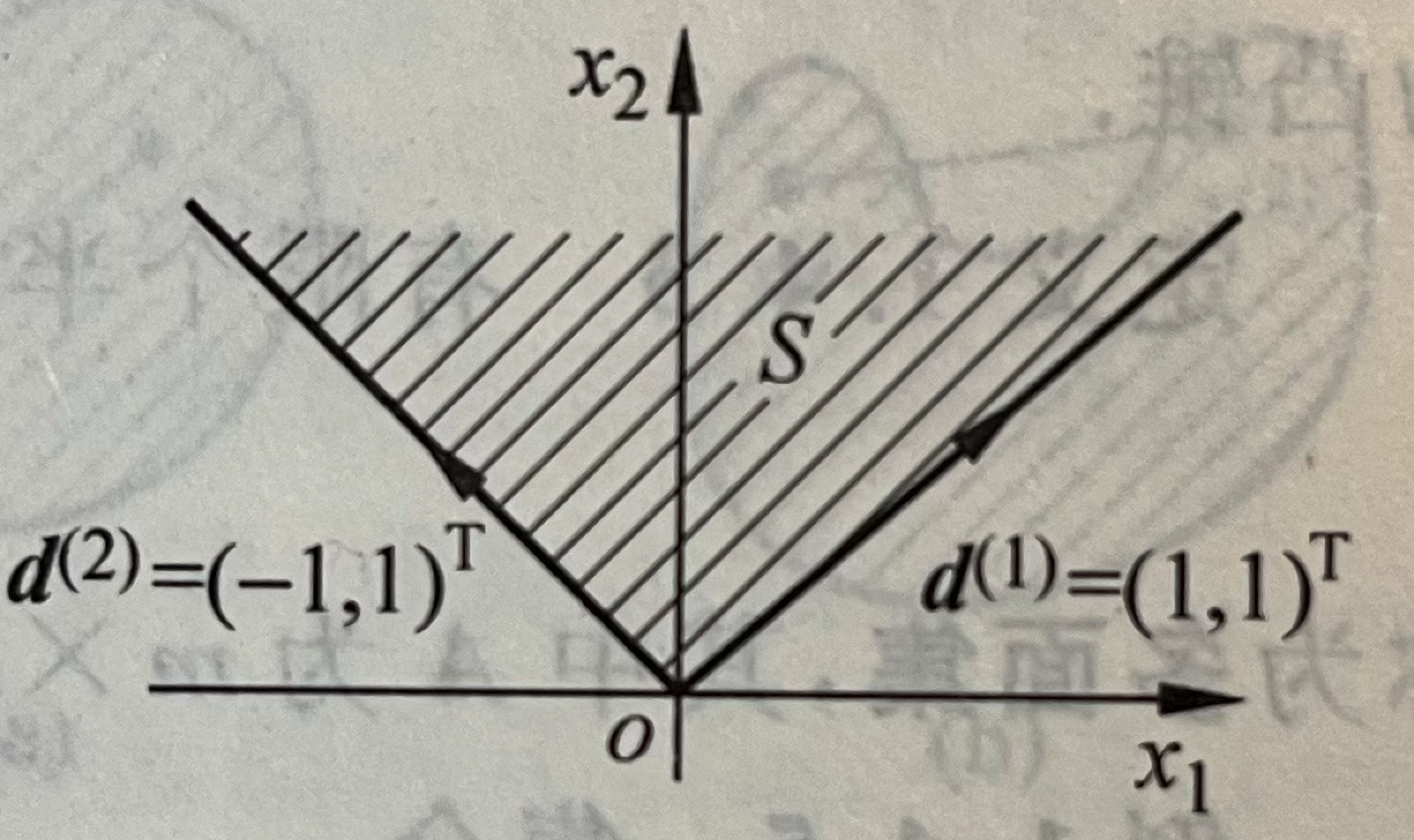
加上极方向后, 内的任意点可以用极点和极方向表示出来:
即凸可行域中的任意一点都可以表示为极点的凸组合+极方向的锥组合。
一般的线性规划总是可以写成如下标准形式(通过添加松弛变量,将不等式约束变为等式约束,同时提升可行域的维度等方法):
其中 ,
,
化成标准形式的目的是便于引出基本可行解的概念和性质,进而为单纯形方法做铺垫。
我们引入基本可行解的目的是为了便于缩小最优解的范围。通过前面的分析,我们已经知道线性规划的最优解一定在极点处取得,因此只需找出极点的集合,则最优解一定在这个集合中。但是极点是个很强的几何概念,虽有直观的优势,但是它对于数值计算来说不太方便。因此,我们从数值上引入基本可行解的概念,并证明它与极点等价。基本可行解的代数含义很明确,便于演算。于是,我们将求解线性规划问题转变为求解可行域的极点问题,进而转换为求解基本可行解的问题。
接下来先给出基本可行解的定义,然后给出定理说明基本可行解与极点等价。
设 ,已经假设矩阵
的秩为
,则必存在
个线性无关的列向量。设这
个列向量的下标组成的集合为
;又设
是
中以
的元素为下标的列向量构成的
方阵。设有点
,它的以
中元素作为下标的分量构成的列向量为
。称
为基矩阵,
称为一组基,各分量为基变量,
中其他分量为非基变量。令非基变量全为
,则显然有
。此时,
称为基本解(注意:基变量和非基变量在
中的对应位置不变)。又若
还满足不等式约束
,称
为基本可行解。(这段话比较绕,多读几遍)
至于基本解为什么要叫这个名字。个人认为“基”和线性空间里的“基”是类似的。还记得前面说的,紧的凸集中任何一个点都可以由极点线性表出吗?那么这里极点就相当于一个空间里的基(不严谨,但可以这样理解),于是极点对应的解就称为基本解。
下面举一个例子来帮助理解基本可行解的概念:
例:设一个标准线性规划的等式约束为 ,其中
,
,求解该线性规划的基本可行解。
解 令 。
- 令
, 解出
,则
- 令
, 解出
- 令
, 解出
,则
,
不满足不等式约束
,因此不是基本可行解。
所以本题中线性规划的基本可行解为。
几点发现:
- 根据基本可行解的概念,我们可以知道基本可行解最多可以有
个,因为从
个列向量中选取
个作为基的可能的选法有
- 线性规划的基本可行解只与系数矩阵
和偏置
有关。
- 基本可行解中正分量的个数不超过系数矩阵的秩。
定理:令 ,
是
矩阵,秩为
。则
的极点集与
的基本可行解等价。
这里不给出严格证明,只描述证明思路:分别证明充分性和必要性。
- 已知
个正分量,先证明
个列向量与这
,
和其他非基变量(都是0)。由此可得
,因此
- 已知
分别为可行解,且
,则
得到
,从而
。因此
有了这个定理,我们可以将求解极点问题转换为求解基本可行解问题。然后再基本可行解集中寻找最优解。即,线性规划问题的求解,可归结为求最优基本可行解。这也正是单纯形方法的基本出发点。
直接给出定理而不加证明。
定理:如果 有可行解,则一定存在基本可行解。
上文已经探讨了线性规划最优解与基本可行集的关系,即如果线性规划具有最优解,它一定能在基本可行解中找到。我们可以先找到所有的基本可行解,然后代入目标函数,寻找最大值。然而,一个 的系数矩阵可能有多达
个基本可行解,如果
,那么时间复杂度会很高。所以应该改良这种暴力算法,采用一种更高效的方法。这就是成熟的单纯形法(Simplex Algorithm or Simplex Method)。
这部分内容不打算按照课本那样用定理和公式来解释单纯形法(但是重要的推导还是有必要的),而是着重于剖析其原理。由于“基本可行解”和“极点”的定价性,下文可能将二者混用,以便更好地理解。
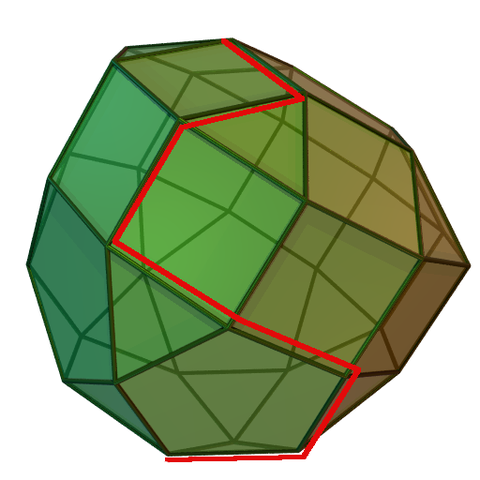
首先介绍单纯形法的思想:相对于暴力算法,单纯形法从一个基本可行解切换到另一个基本可行解时,不是盲目的切换。首先,它只会沿着边(edge)切换到与它相邻的极点。其次,它只会切换到能改良优化目标的极点。重复这样的做法,直到再也找不到能改良优化目标的相邻极点时,此刻所在的极点就是本次线性规划的最优解。这种做法的合理性基于以下事实:若一个极点不是线性规划的最优解,则它的一个相邻极点比它更优。
那什么样的相邻极点是更好的呢?不妨设此时所在的极点是 ,它的一个相邻极点是
。则如果
的方向与目标函数的负梯度方向成锐角,那么
一定比
更优(这是显然的)。用数学公式描述为
。
我们就以该不等式为出发点探究 应满足什么条件。
首先,规定一些符号。从 中抽取其所有基变量组成
维向量
,剩余的非基变量组成
维向量
(基本可行解的非基变量都是零)。类似地,分别从
中抽取出
。然后从
中抽取与
相同位置的变量
,
。
强调一下, 不是代表
的基变量组成的向量,它只是代表和
位置而已,同样
也不是零向量(后面会说它的含义)。
下面正式开始推导。
注意 是任取的。也就是说,只要满足
就说明还有优化空间,即从
切换到
;否则,意味着
就是该问题的最优解。
问题转变为我们从当前极点,挑选满足不等式的相邻极点,然后切换到该极点就完成了一次优化的迭代。那如果多个极点满足该条件呢?理论上我们应该取
最大的那个。可是,这要求要找出当前极点的所有相邻极点,也需要很大的计算量(虽然比暴力解法确实进步了)。所以,可以退而求其次,取使
最大的就行,因为这个是不需要其他极点就能计算的。
在继续讨论之前,我们给出 的含义。我们知道当从一个极点移动到另一个极点时,非基变量中有且仅有一个会从0增加到一个正值。由于
是相邻极点,
是0向量,所以
中有一个元素为正值,其余全是0。
现在来探究一下意味着什么。
将不等式写成分量形式: ,其中
是非基变量的下标集合。再设
中不为0的元素下标为
,则不等式可进一步化简为
。令
,称为判别数。
所以这个不等式的意思其实是:如果当前所在极点存在某个属于非基变量下标集合的下标 ,它对应的各参数满足这个不等式,那么我们可以让
成为新的基矩阵的元素,这个基矩阵对应的基本可行解优于当前可行解。
那如果有多个下标 满足该不等式呢?当然是选取
。注意,我们没有计算所有的相邻极点,而是根据
的特殊结构,计算出所有的相邻极点对应的判别数
,再取它们中最大的对应的下标,作为新入基列的下标。有列入基,就有列出基,因为基矩阵只容纳
个列。那应该怎么选择出基的那一列呢?
为了便于说明,先将问题作一个化简:我们令 。这总是可以通过行初等变换做到,相应的
也同时做一样的行初等变换以保持解不变。这样变换后的
的值就是基变量的取值(如果
经过行初等变换后有负的元素,那就说明这个基矩阵对应的基本解不可行,应该重新寻找基矩阵)。当有新列入基时,我们将该列变换为
中的某一列,即只有一个元素为1,其余元素都为0;然后,与新列重复的那一列出基。那么我们应该将新列的哪个元素(主元)变换为1呢?设新列的第
个元素为
,取
对应的那个下标。因为只有这样才能保证在行初等变换时,不会把
中的元素消为负数。还有一个问题是,如果新入基列
中所有元素都小于等于0呢?这样的话,
是不存在的(因为
必定非负)。实际上,出现了这样情况说明该线性规划问题无最优解(目标函数可以任意小)。
介绍完单纯形方法的原理,步骤也就呼之欲出了。这里简要做一个总结。
- 将线性规划问题转换为标准形式
- 在系数矩阵
。如果此时
,则重新寻找基矩阵并转换为单位阵,直到
。
- 计算
中每一列对应的判别数
,然后取
。如果
,则当前基本可行解就是最优解,算法停止。否则,若
,则说明线性规划无最优解,算法停止。否则,选择
作为入基列。
- 计算
对应的
,将
作为主元,通过行初等变换将主元化为1,其余元素化为0,实际完成了入基。返回步骤3。
PS: 操作过程中,一定要注意各参数的对应。比如如果基矩阵 ,那么相应的
,而不是简单得按照顺序取
等等。
上面给出了单纯形方法的原理和步骤,对线性规划问题给出了一个成熟优雅的方案。但是,还是有一点小瑕疵,那就是单纯形方法的第一步:寻找初始的基本可行解。如果系数矩阵 中存在能组成单位矩阵的列向量,那就很完美,我们已经找到了一个基本可行解。但若不存在单位矩阵呢?一般情况下,很难直接看出哪些列是线性无关的。因此 ,我们需要人为地构造出一个单位矩阵来提供初始的基本可行解。两阶段法和大M法提供了这样的功能。本小节简要介绍两阶段法;下一节简要介绍大M法。
在一个标准线性规划问题中,一般不存在现成的单位矩阵,两阶段法通过引入人工变量 ,将
的每个元素添加到每个方程中,等价于在
右端增加了一个单位向量
。但是这个做法已经破坏了方程组的结构,没关系,后续的处理(即第一阶段)会讲人工变量逼出基变量,从而消除这个不好影响。
求解一下线性优化问题,以消除人工变量的影响:
其中 。
因为有初始基本可行解,且目标函数有下届,所以必存在最优基本可行解,设为 。此时,有三种情况:
,则原线性规划无可行解。因为若原线性规划有可行解,则
是这个线性规划的可行解,则目标函数可以取0,矛盾。
且
的分量都是非基变量。则
用第一阶段得到的基,求解原线性规划问题。
大M法和两阶段法类似,都是通过引入人工变量构造单位矩阵,然后迫使人工变量离基。但大M法只需要一个阶段,它的思想是在目标函数上加上很大的倍数M的人工变量的惩罚项,在优化过程中使人工变量必须为0。大M法其实是两阶段法中两个阶段的结合。
大M法求解以下线性规划问题。
其结果必是下面三种情况之一:
- 达到线性规划最优解,且
- 达到线性规划最优解,且
- 不存在有限最优值,则原线性规划问题无界或无可行解。




热门文章排行
- 共享,正从风口到风险
- 世界十大假戏真做的电影排行榜 真枪实弹太
- 走进涂料市场的秘密
- 在人工智能炒热机器人时,也被人把风带进了
- 生物涂料有什么好处?
- 智能音箱,正走在智能手表的老路上
- “去乐视化”之后,新易到的机会在哪儿?
- 日本十大波涛汹涌巨乳美少女第5名,凶悍!
- 揭开芽笼神秘面纱
- 菜刀材质的3铬钢、5铬钢、9铬钢,差别有
最新资讯文章
- CSS Navigation Bar
- 高考成绩口语合格是什么意思
- 高中物理动力学常见知识点及公式总结
- 2017新人教版部编人教版二年级语文语文
- DOTA2比分
- 2023年零食带货人气主播TOP10揭晓
- 商务部:4月以来电商平台外贸专区销售额超
- 推荐5款主流的私家车小件接单app,帮助
- 英文很蹩脚?如何找到优质的外包写手?怎么
- 2025年中国生物医药产业链图谱及投资布
- 如何打拼音时加上声调?
- 抖音电商618数据发布:超6万个品牌成交
- 物流外包是什么意思_1
- 中国电竞酒店行业现状分析与投资前景预测报
- 长治医学院2021年全日制普通本科招生章
- 书卷一梦_2
- 未成年将禁止参加电竞赛事?网游新规下电竞
- [官方资料]NVIDIA Jetson
- 苏丹伊德理斯教育大学 | 马来西亚苏丹伊
- 2023版美国留学行前准备指南 | 入境



